[패턴인식] 특징 기술(1): 특징 기술자, 영역 기술자
Feature Describe
목차
0. PREVIEW
1. 특징 기술자의 조건
2. 관심점을 위한 기술자
3. 영역 기술자
4. 텍스쳐
5. 주성분 분석
6. 얼굴 인식: 고유 얼굴
0. PREVIEW
앞 절에서 공부한 특징 검출 단계
- 에지, 지역특징,영역
- 매칭에 사용하기에 턱없이 빈약한 정보

풍부한 정보를 어떻게 추출할까?
- 특징 기술 단계는 검출된 특징의 내부 또는 주위를 들여다 보고 풍부한 정보를 추출
- 특징의 성질을 기술(Describe)해주므로 기술자(Descriptor),
- 또는 여러 개의 값으로 구성된 벡터 형태이므로 특징 벡터(Feature Vector)라고 부름
1. 특징 기술자의 조건
특징 기술자(Feature Descriptor)
- 특징을 일련의 숫자(벡토)로 표현한 것
- 특징 기술자를 통해 생성된 특징 벡터 간 거리(distance) 또는 유사도(similarity) 계산
매칭이나 인식에 유용하기 위한 몇 가지 요구 조건
- 높은 분별력
- 다양한 변환에 불변
- 기하 불변성(Geometry Invariant)과 광도 불변성(Photometric Invariant)
- 변환에도 불구하고 같은(유사한) 값을 갖는 특징 벡터 추출해야 함
-
다양한 변환
- 특징 벡터의 크기(차원)
- 차원이 낮을수록 계산 빠름
- 응용에 따라 공변과 불변을 선택해야 함
2. 관심점을 위한 기술자
관심점을 어떻게 기술할 것인가?

- 들여다 볼 윈도우의 크기가 중요
- 스케일 정보가 없는 관심점의 경우(해리스 코너)
- 윈도우 크기를 결정하는데 쓸 정보가 없음
- 스케일 불변성 불가능
- 스케일 정보가 있는 관심점(SIFT, SURF)
- 스케일 $\sigma$에 따라 윈도우 크기 결정
- 스케일 불변성 달성
2.1 SIFT 기술자
4장에서 검출한 SIFT 키포인트(관심점)
- 검출된 옥타브 $o$, 옥타브 내의 스케일 $\sigma_o$, 그 옥타브 영상에서 위치 $(r,c)$ 정보를 가짐
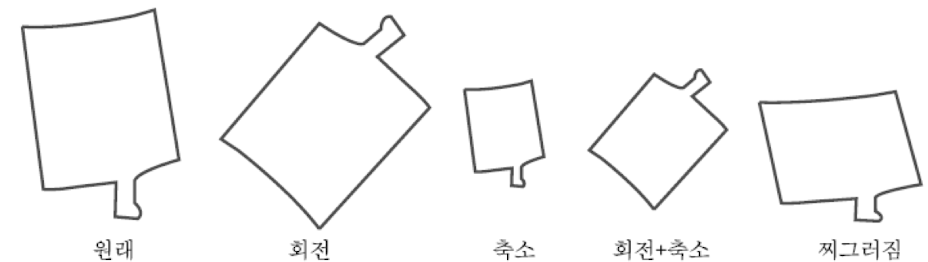
SIFT 기술자의 불변성
- 스케일 불변 달성
- 윈도우를 옥타브 $o$, 스케일 $\sigma_o$인 영상의 위치 $(r,c)$에 씌움
- 회전 불변 달성
- 지배적인 방향 계산
- 윈도우 내의 그레디언트(gradient) 방향 히스토그램을 구한 후, 최대값을 갖는 방향을 찾음
- 윈도우를 이 방향으로 씌움
- 광도 불변 달성
- 특징 벡터 x를 ||x||로 나누어 정규화함
- normalized x = $\frac{x}{||x||}$
SIFT 기술자 추출 알고리즘

- 윈도우를 4*4의 16개의 블록으로 분할
- 각 블록은 그레디언트(gradient)방향 히스토그램 구함
- 그레디언트 방향은 8개로 양자화
- 4*4*8=128 차원 특징 벡터 X
- 알고리즘
-
더보기더보기
# input: detected keypoint set p_i, by input image f # p_i = (y_i, x_i, sigma_i), 1 <= i <= n # output : keypoint set p_i that adding descriptor # p_i = (y_i, x_i, sigma_i, theta_i, X_i), 1 <= i <= m for i in range(1, n+1): # calculate dominant direction theta_j about p_i, # that time, one keypoint can be multiple keypoints ... # calculate feature vector x_u about p_i ... # normalize X_i ...
-
2.2 SIFT의 변형
PCA-SIFT(Principle Component Analysis)
- [Ke2004]
- 키포인트에 39*39 윈도우를 씌우고 도함수 $d_y, d_x$를 계산
- 39*39*2차원의 벡터를 PCA를 이용하여 20차원으로 축소
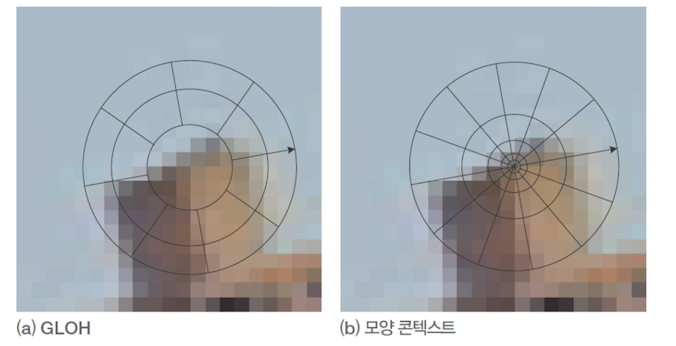
GLOH, 모양 콘텍스트
- [Mikolajczyk2005a]
- GLOH
- 원형 윈도우로 17*16차원의 벡터를 추출하고, PCA를 이용하여 128차원으로 축소
- 모양 콘텍스트
- 원형 윈도우로 36차원 특징 벡터 추출
2.3 이진 기술자
빠른 매칭을 위해 특징 벡터를 이진열로 표현
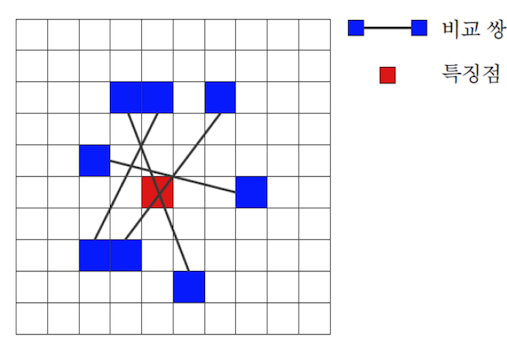
- 비교 쌍의 대소관계에 따라 0또는 1
- 비교 쌍을 구성하는 방식에 따라 여러 변형
- 비트 연산 기반의 빠른 연산을 제공함
- 매칭은 해밍 거리(Hamming distance)를 이용하여 빠르게 수행
- 해밍거리란? 곱집합 위에 정의되는 거리 함수로, 같은 길이의 두 문자열에서 같은 위치에서 서로 다른 기호들이 몇 개인지를 셈
- '1011101'과 '1001001'사이의 해밍 거리는 2이다. (1011101, 1001001)
- "toned"와 "roses"사이의 해밍 거리는 3이다. (toned, roses)
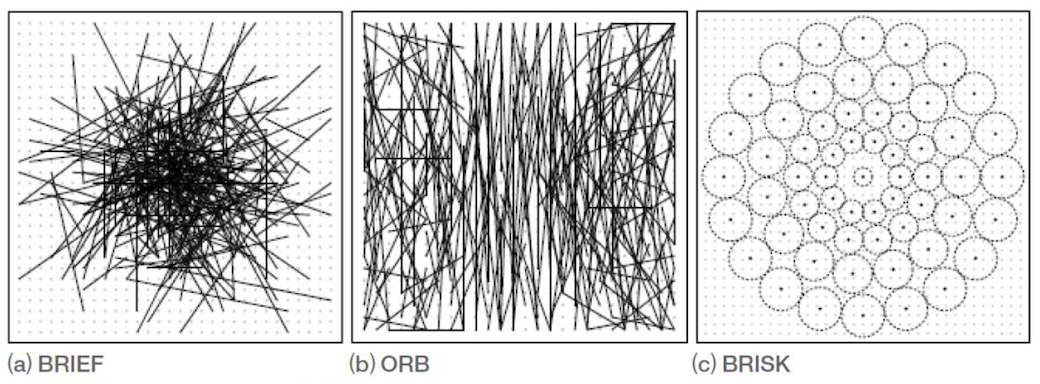
BRIEF, OPR, BRISK
- 이진 기술자의 특성 비교
-
스케일 불변 회전 불변 특징 벡터 비트 수 BRIEF X X 256bit ORB X O 512bit BRISK O O 512bit
-
- 세 가지 이진 기술자가 사용하는 조사 패턴
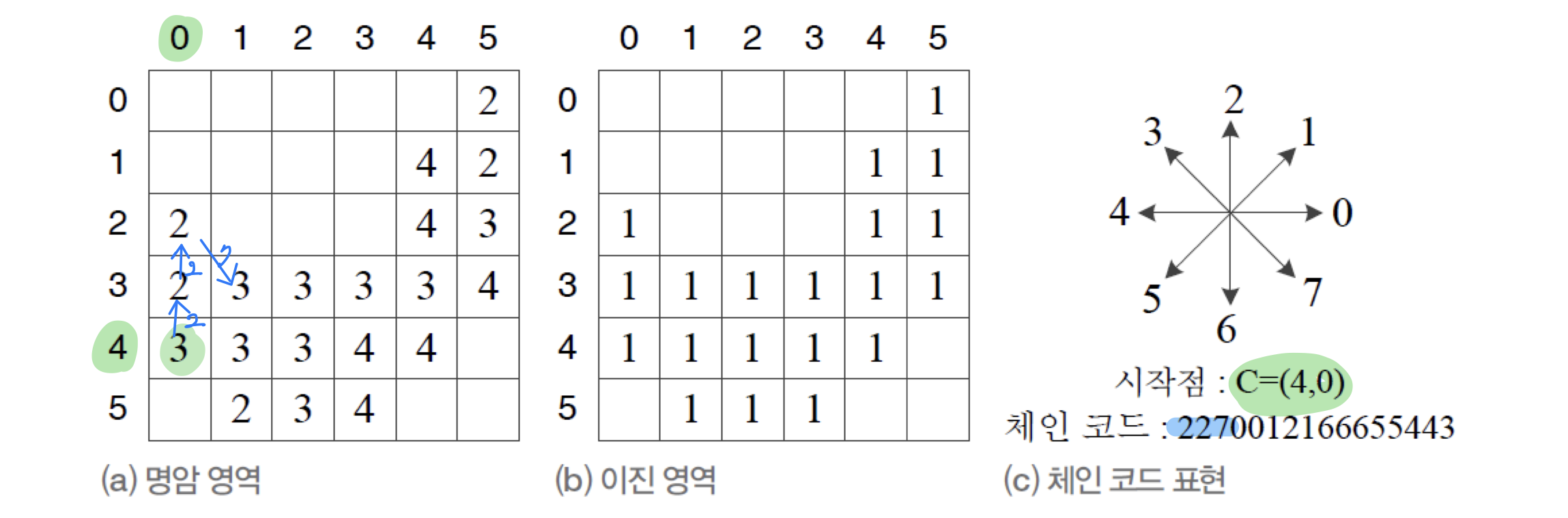
3. 영역 기술자
영역의 표현
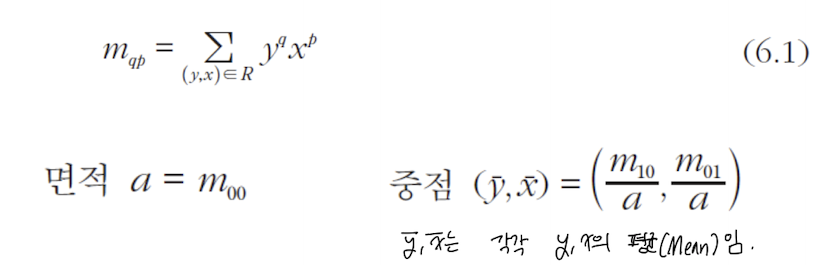
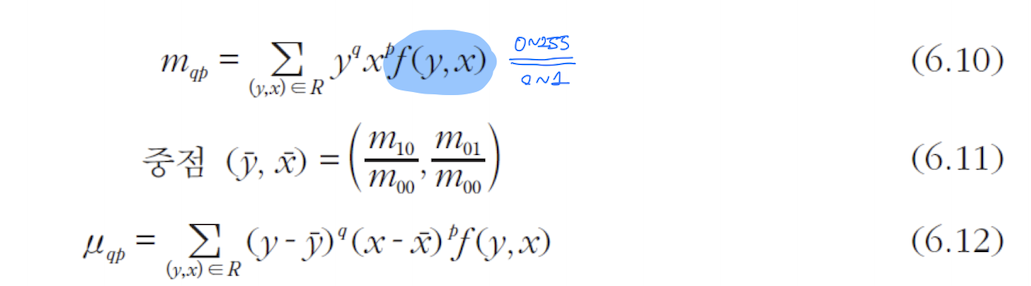
3.1 모멘트
(q+p)차 모멘트
물리에서 힘을 측정하는데 쓰는 모멘트를 영상에서 특징을 추출하는데 적용
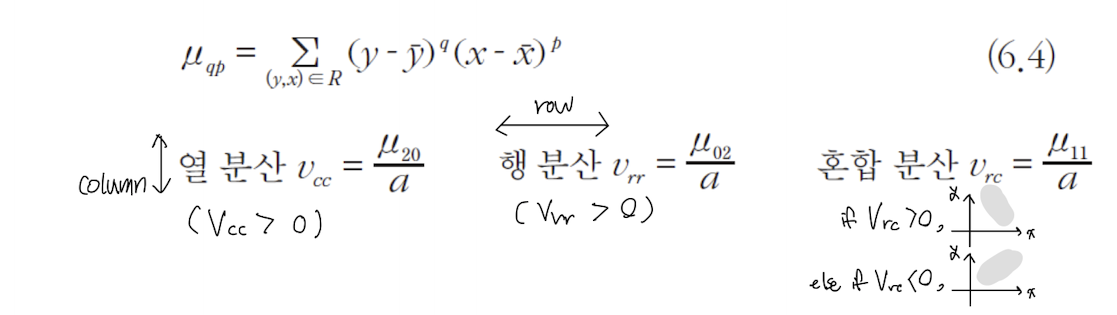
중심 모멘트
크기(스케일) 불변 모멘트

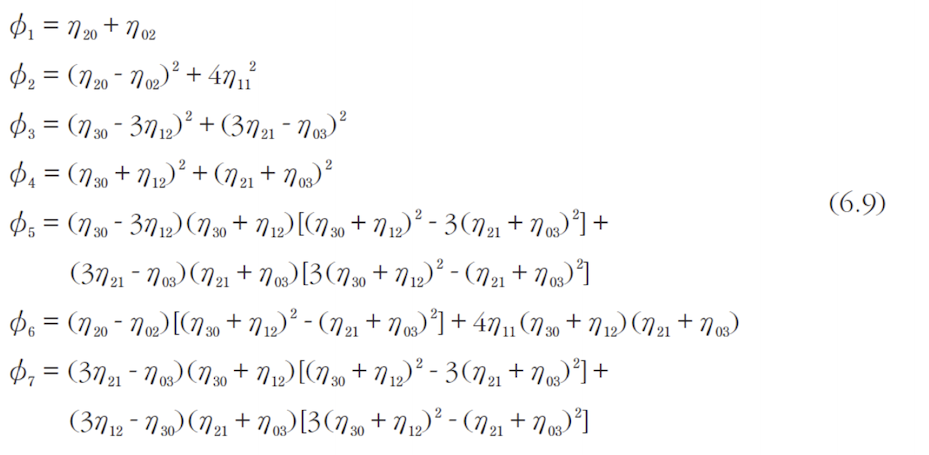
회전 불변 모멘트(PASS)
명암 영역의 모멘트
식 (6.8)의 크기 불변과 식 (6.9)의 회전 분변한 모멘트는 동일하게 정의됨, 잘 안쓰는 모멘트
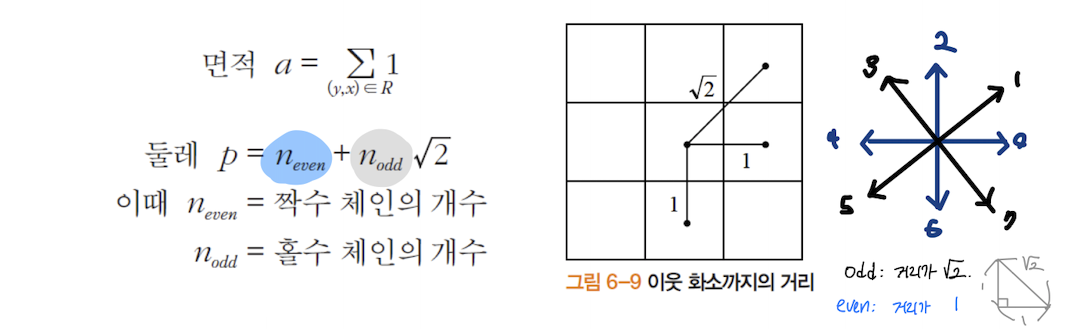
3.2 모양
여러가지 모양 특징


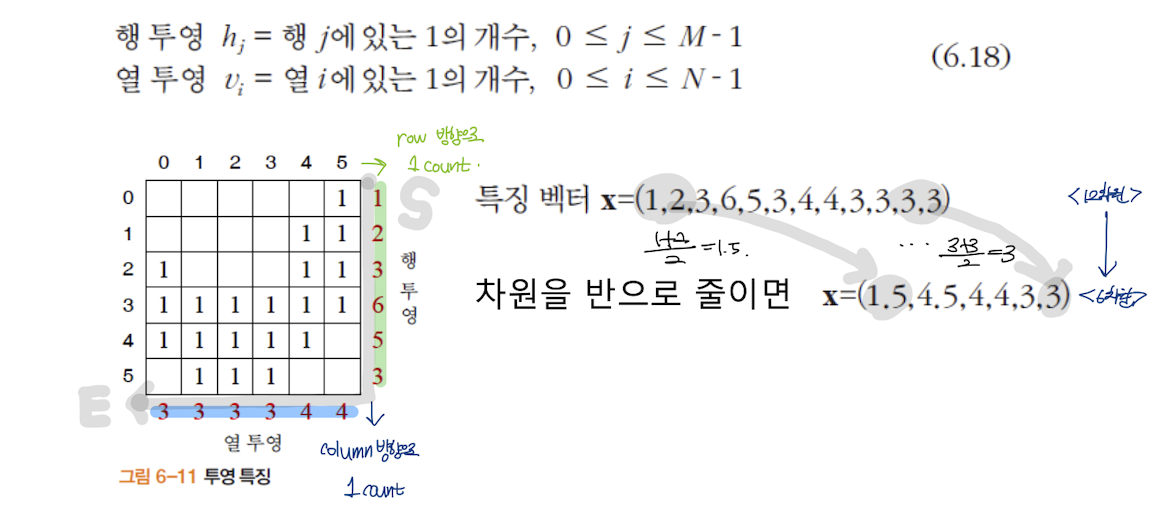
투영
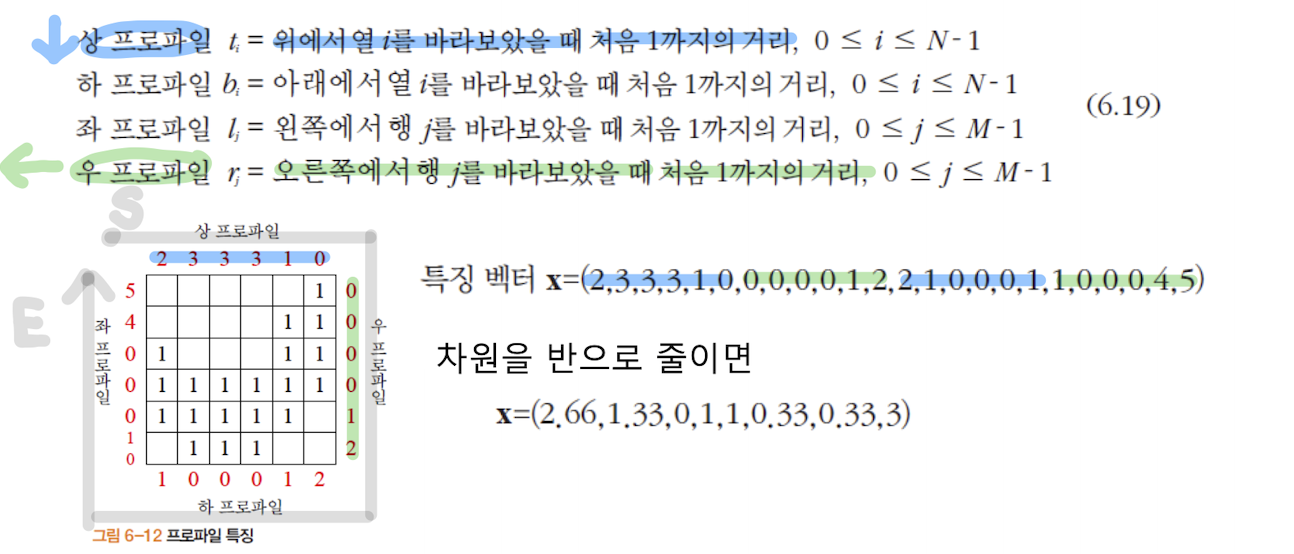
프로파일
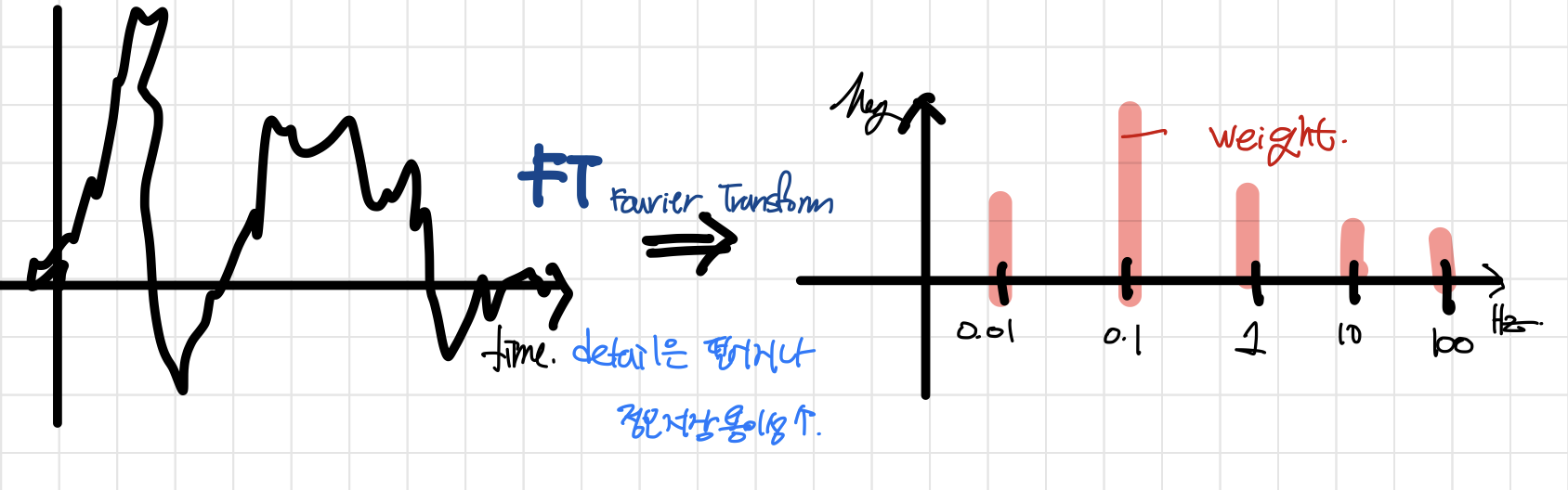
3.3 푸리에 기술자(Fourier Transform)

신호를 기저 함수의 선형 결합으로 표현
두 신호의 계수(0.5,2.0)과 (2.0,0.5)는 둘을 구별해주는 좋은 특징 벡터임

신호가 입력되면 어떻게 계수를 알아낼 것인가?

- 푸리에 변환으로 가능
- t(.)가 계수에 해당
- i축: 공간 도메인, u축: 주파수 도메인
-
영역에 푸리에 변환을 어떻게 적용하나(PASS)
<4. 텍스쳐 부터는 다음 게시글에서 계속...>
https://codingsmu.tistory.com/121
[패턴인식] 특징 기술(2): 특징 기술자, 영역 기술자
codingsmu.tistory.com